Link to paper: https://arxiv.org/abs/2307.07511
Paper published on: 2023-07-14
Paper's authors: Nilesh Kulkarni, Davis Rempe, Kyle Genova, Abhijit Kundu, Justin Johnson, David Fouhey, Leonidas Guibas
GPT3 API Cost: $0.05
GPT4 API Cost: $0.11
Total Cost To Write This: $0.16
Time Savings: 23:1
The ELI5 TLDR:
This research is about making computer-generated movements look more realistic. They created a new model called NIFTY that uses a special field to help generate movements. The model also uses a process to clean up the movements and make them smoother. They tested the model and found that it performed better than other models. They also created a way to generate fake movement data for training the model. They provided some code and explained how they evaluated the model's performance. They also talked about some limitations and ideas for future research.
The Deeper Dive:
Understanding the NIFTY Framework: Neural Interaction Fields for Trajectory Synthesis
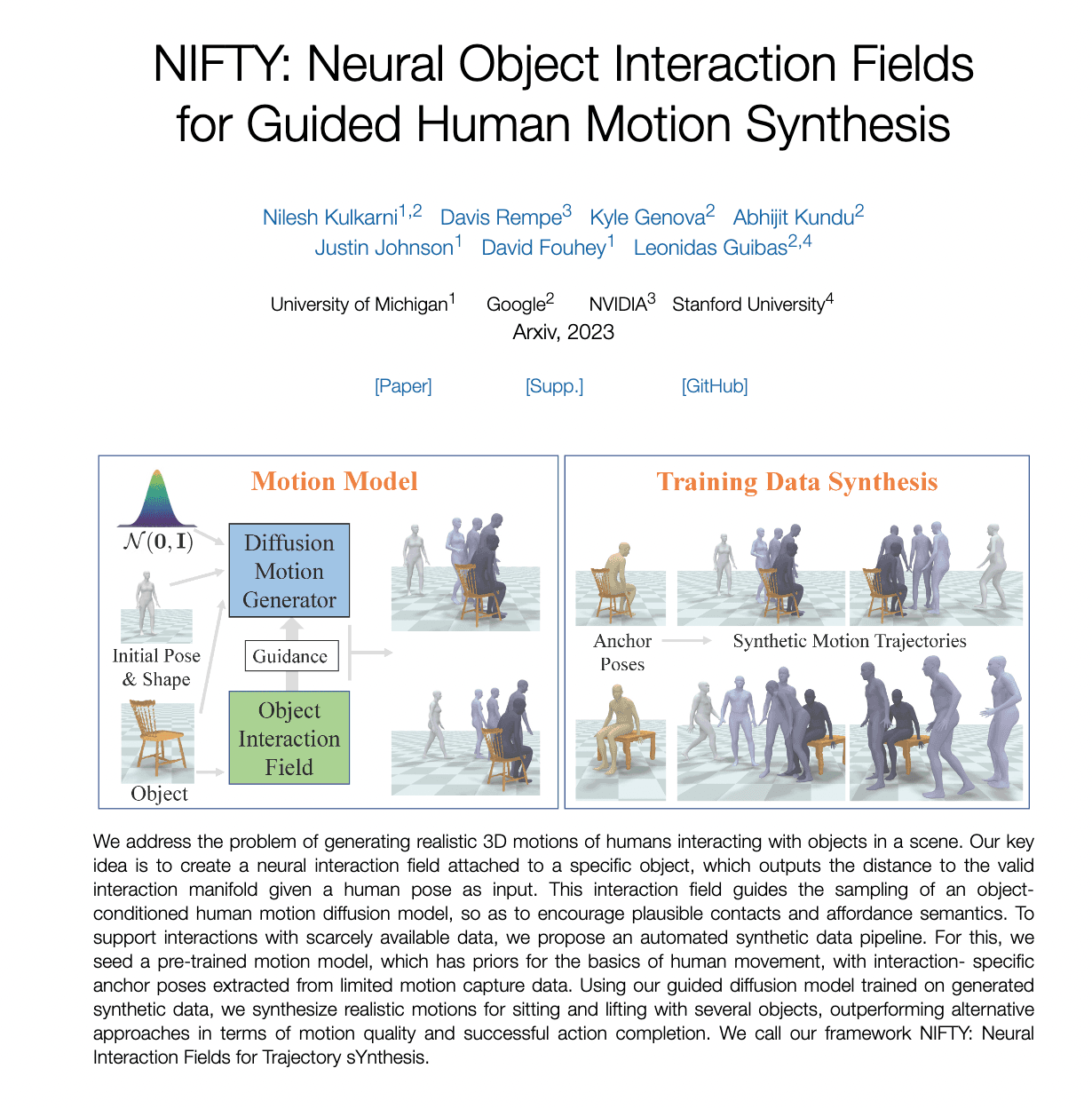
The focus of this research is the generation of realistic 3D human-object interaction motions. The researchers introduce NIFTY, a novel model that employs a neural interaction field attached to a specific object to guide the generation of human motions. The interaction field provides the distance to the valid interaction manifold given a human pose as input. This tutorial will delve into the specifics of this novel approach, its capabilities, and potential applications.
The NIFTY Framework
The NIFTY framework is designed to generate plausible human-object interaction motions. It employs a diffusion model that learns to denoise motion trajectories and generate clean motion sequences. This model uses a Markov process with a transition probability distribution to denoise the motion trajectories. It's conditioned on interaction information, which includes object point cloud, object pose, body shape parameters, and the starting pose of the person.
In contrast to other models that predict the noise added at each step of the diffusion process, this model directly predicts the final clean signal. At test time, random noise and interaction conditioning are used to generate samples from the model. The model can be guided using a differentiable function that evaluates how well a trajectory meets a desired objective.
The Object Interaction Field
The researchers propose an object interaction field that guides motion samples to adhere to the geometric and semantic constraints of the object. This field operates in the local coordinate frame of a specific object and outputs an offset vector that projects the input pose to the manifold of valid interaction poses for the object. The interaction field is trained using a dataset of invalid poses with corresponding valid interaction poses.
Synthetic Interaction Motion Data Generation
The researchers propose an automated pipeline to generate synthetic interaction motion data. This pipeline uses a pre-trained scene-unaware motion model to sample diverse motions that end at selected anchor poses. The generated motion data is filtered to ensure diversity and realism. The pipeline seeds a pre-trained motion model with interaction-specific anchor poses extracted from limited motion capture data.
Implementation and Evaluation
The NIFTY method is evaluated after training on datasets of sitting and lifting interactions. The evaluation metrics include a user perceptual study, foot skating score, distance to object, penetration score, skeleton distance, and contact IoU. Experimental results show that NIFTY outperforms the baselines in terms of user preference, foot skating, distance to object, penetration score, skeleton distance, and contact IoU.
Synthetic Data Generation Pipeline
The paper presents a synthetic data generation pipeline for training models on human-object interaction motion data. The quality of the generated data is evaluated through a large-scale user study, which shows that the generated synthetic training data is comparable to data collected using a real mocap setup.
The data generation algorithm involves utilizing a pretrained motion model to produce motion trajectories that end in a specific anchor pose. The algorithm constructs a tree of motion sequences by generating motion sequences using the RollOut function and checking their validity using the PruneCheck function. The algorithm outputs the resulting tree, which contains valid motion sequences as paths from the root to the leaf nodes.
Code Snippet and Experimental Details
The code snippet provided is a function that generates motion sequences using a pretrained motion model. The function uses a while loop to generate motion sequences until a valid sequence is found or a maximum number of iterations is reached. The motion sequences are pruned using a PruneCheck function to determine if they are valid. If a valid sequence is found, it is returned. Otherwise, null is returned.
Evaluation and Results
The research focuses on evaluating the performance of the NIFTY pipeline in generating realistic motions for sitting and lifting actions. The evaluation metrics include Foot Skating, D2O (distance to object), Skeleton Distance, Contact IoU, and Penetration. The results show that NIFTY performs well in terms of Foot Skating, D2O, and Penetration metrics, with stable performance even with limited anchor poses. The performance of NIFTY is not dependent on the type of object, indicating its flexibility in handling different objects.
Future Research and Limitations
The current approach is limited to the body shapes present in the training data and future work should explore data augmentation strategies to generalize to novel humans. The researchers would like to widen the scope of NIFTY to handle additional interactions by collecting new anchor poses, synthesizing data, and training the diffusion model and interaction field. Developing more robust motion models that can handle such poses would be beneficial. Exploring research directions to enhance the stability of the guidance process would be valuable in consistently generating high-quality interaction motions.